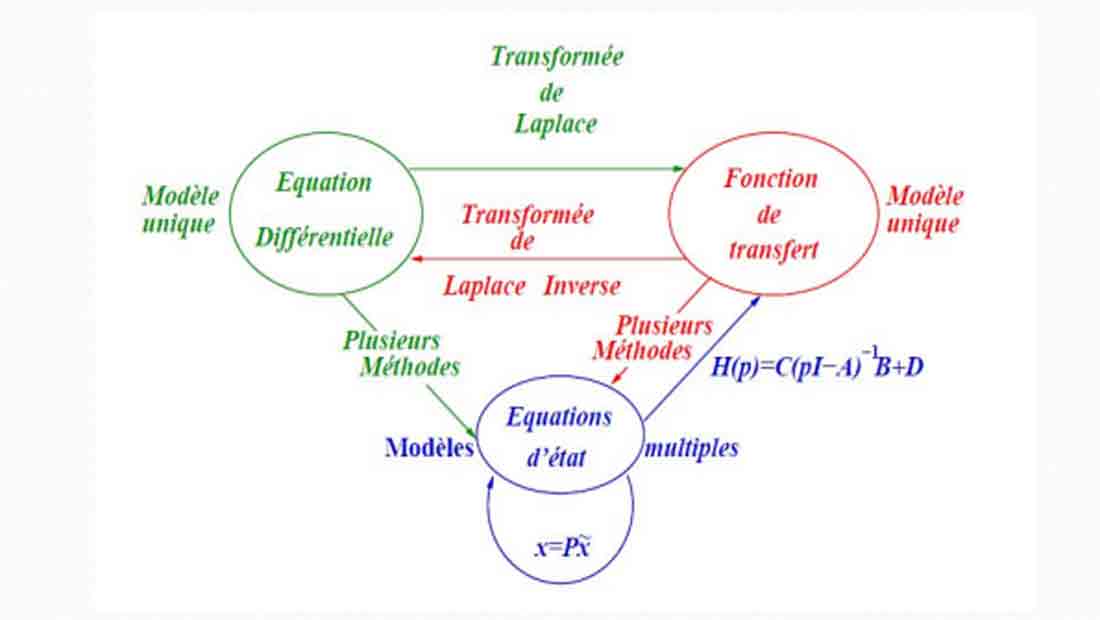
Alors, on s'amuse un peu avec la représentation d'état ? Oui, oui, vous avez bien entendu ! Peut-être que l'idée de transformer une humble fonction de transfert en une série d'équations d'état ne vous emballe pas au premier abord, mais croyez-moi, c'est comme découvrir une nouvelle façon de jongler avec les systèmes. Imaginez pouvoir décortiquer un système complexe, le comprendre en profondeur et le contrôler avec une précision chirurgicale. C'est exactement ce que la représentation d'état vous permet de faire ! Son but principal est de fournir une description complète du comportement d'un système à un instant donné, en tenant compte de son état actuel, de ses entrées, et de ses sorties. L'un des principaux avantages est sa capacité à gérer facilement les systèmes multi-entrées/multi-sorties (MIMO), là où les fonctions de transfert classiques montrent leurs limites. De plus, elle offre une base solide pour l'analyse de la stabilité et la conception de contrôleurs avancés.
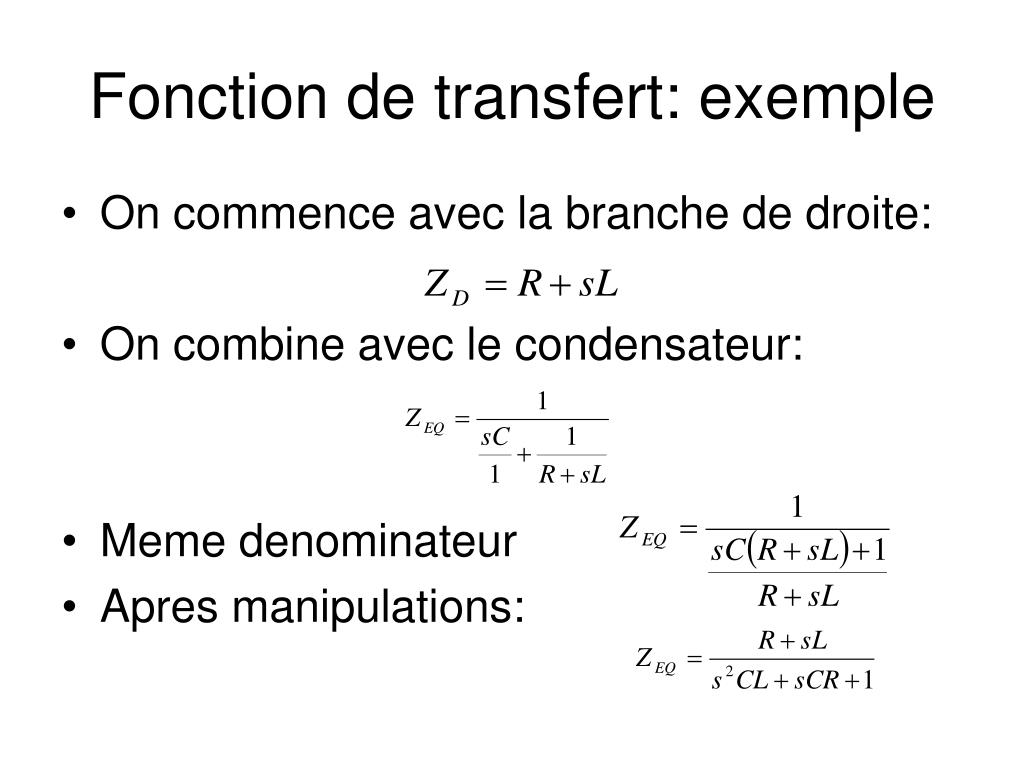
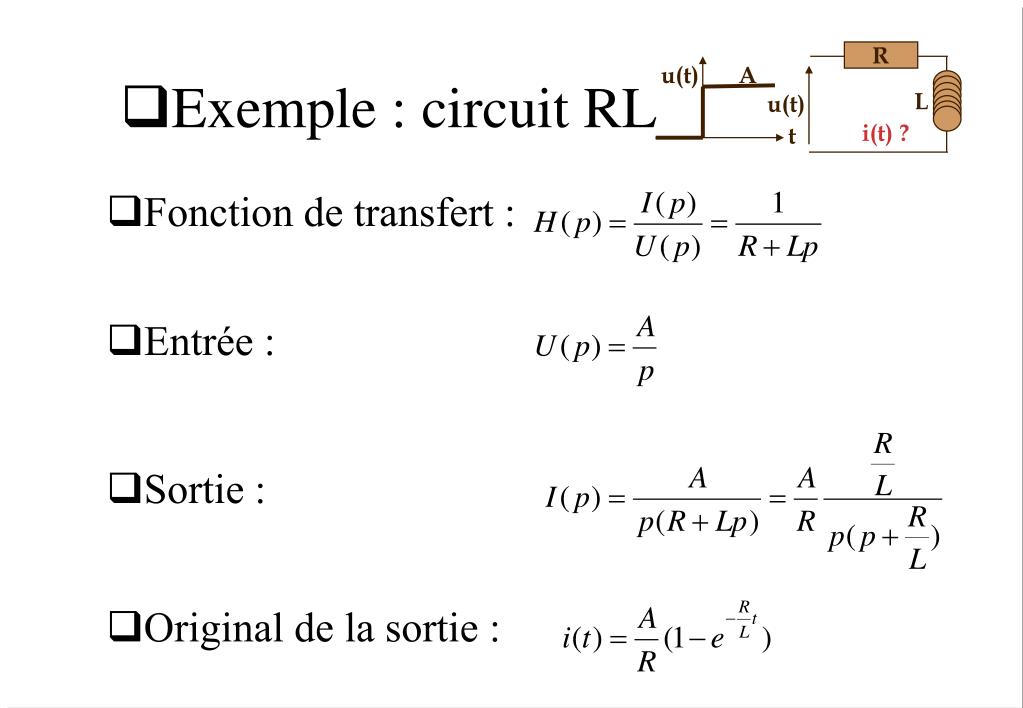
Maintenant, comment transformer cette fonction de transfert en un magnifique ensemble d'équations d'état ? Il existe plusieurs méthodes, mais concentrons-nous sur la plus intuitive, la méthode dite de la "variable d'état". Prenons un exemple simple : une fonction de transfert du second ordre, comme celle qu'on rencontre souvent dans les systèmes mécaniques ou électriques :
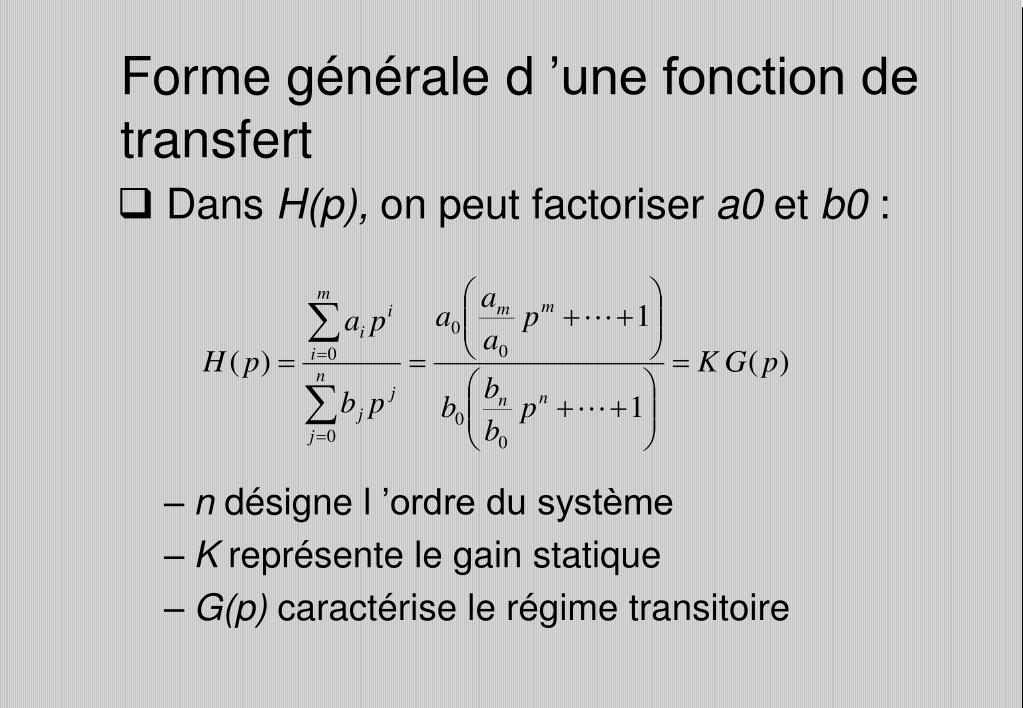
H(s) = Y(s) / U(s) = (b1s + b0) / (s^2 + a1s + a0)
Ici, Y(s) représente la sortie, U(s) l'entrée, et les 'a' et 'b' sont des coefficients constants. L'astuce consiste à introduire des variables d'état. Pour un système d'ordre n, vous aurez généralement n variables d'état. Dans notre cas, comme c'est du second ordre, on aura deux variables, disons x1 et x2. Une façon courante de les définir est :
x1 = y (la sortie)
x2 = y' (la dérivée de la sortie)
Ensuite, il faut exprimer les dérivées de ces variables d'état en fonction des variables d'état elles-mêmes et de l'entrée. Cela peut sembler compliqué, mais on part de l'équation de la fonction de transfert, on la transforme en une équation différentielle, et on substitue nos variables d'état. On finit par obtenir quelque chose comme ça :
x1' = x2
x2' = -a0x1 - a1x2 + b0u + b1u'
y = x1
Et voilà ! On a presque terminé. Il ne reste plus qu'à écrire ça sous forme matricielle :
[x1'] = [0 1] [x1] + [0] [u]
[x2'] [-a0 -a1] [x2] [b0]
y = [1 0] [x1]
[x2]
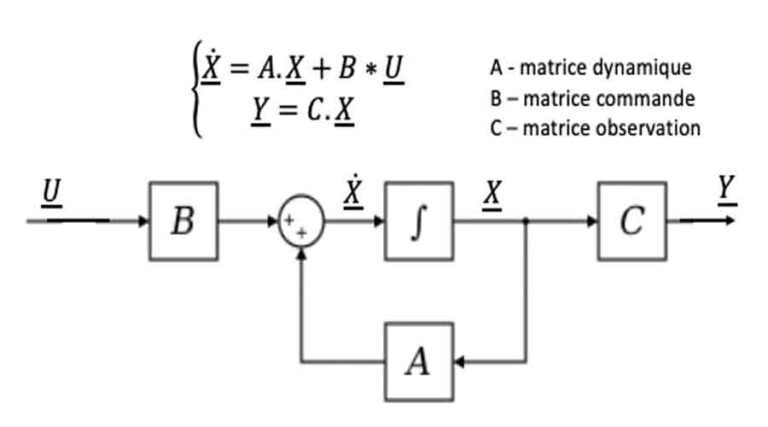
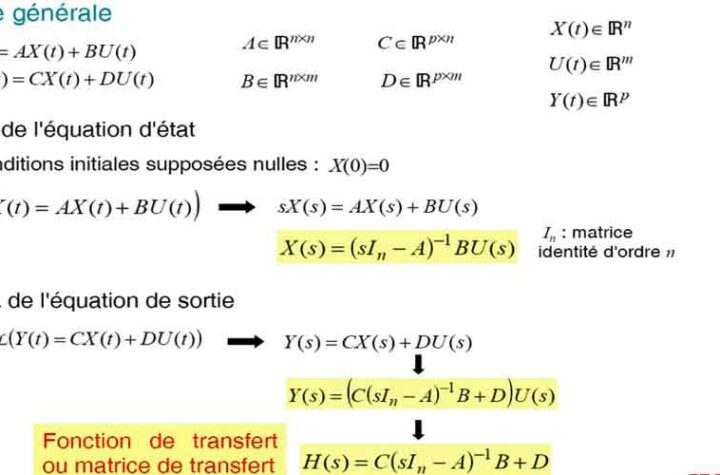
C'est la forme standard de la représentation d'état : x' = Ax + Bu et y = Cx + Du. Dans notre exemple, D est zéro (pas de contribution directe de l'entrée à la sortie). Les matrices A, B et C contiennent les coefficients que nous avons dérivés.
Conseils pratiques: Pour les fonctions de transfert d'ordre supérieur, la démarche est la même, mais avec plus de variables d'état. Si vous avez un terme "s" au numérateur (comme dans notre exemple avec b1*s), cela signifie que l'entrée "u" apparaît dans l'équation de l'état. Entraînez-vous avec des exemples différents, en commençant par des fonctions de transfert simples. N'hésitez pas à utiliser des outils de simulation comme MATLAB ou Python pour vérifier vos résultats. Visualiser la réponse du système à différentes entrées vous aidera à mieux comprendre le comportement de la représentation d'état.
Alors, prêt à relever le défi ? N'oubliez pas, la représentation d'état, c'est un peu comme apprendre une nouvelle langue : plus vous pratiquez, plus vous devenez fluent. Et qui sait, peut-être que vous découvrirez des applications insoupçonnées dans vos propres projets !